코넬대학 연구팀, 역관절 타입의 4족 로봇 개발

최근 화제가 되고 있는 로봇 액션 게임 ‘아마드 코어 6’에서는 로봇의 다리 부분 부품에 따라 성능이 크게 달라진다. 이런 특성은 게임 세계에만 해당되는 이야기가 아니다. 현실 로봇 개발에서도 이동 능력과 점프 능력은 다리 구조에 크게 좌우된다.
최근 미국 코넬대학(Cornell University)에서 오가닉 로보틱스 랩(Organic Robotics Lab)을 운영하는 로버트 셰퍼드(Robert Shepherd) 박사 연구팀은 새로운 구조로 전진하거나 점프하는 소형 4족 로봇을 개발했다고 기술 전문매체 IEEE Spectrum이 보도했다.
로봇의 관절 내부에서 연속 폭발을 일으켜 그 에너지를 이용해 지면을 세게 차는 방식으로 움직인다고 한다.
연구에 관한 자세한 내용은 2023년 9월 14일자 과학지 ‘Science’에 게재돼 있다.
로봇 액션 게임 ‘아마드 코어 6’에서는 지금까지의 시리즈에 이어 역(逆)관절 타입의 다리 부분이 나온다. 이 역관절 타입은 일반적인 양 다리 타입과는 달리 도약력이 뛰어나다. 점프할 때 거꾸로 된 관절을 구부려 모아 그 에너지를 단번에 방출함으로써 높이 점프할 수 있는 것이다.
물론 이것은 게임 세계의 이야기이지만, 현실 로봇의 점프력을 높이기 위해서도 에너지를 모아 단번에 방출하는 방식의 폭발력은 효과적이다.
셰퍼드 박사 연구팀이 새로 개발한 로봇은 말 그대로 ‘폭발’시킴으로써 높은 점프력을 만들어내는 데 성공했다.
일반적인 로봇에는 배터리가 들어 있어 전기적으로 작동한다. 배터리는 조용하고 깨끗하다는 장점이 있지만 에너지 밀도는 크지 않다. 반면에 메탄올 등 화학연료의 에너지 밀도는 배터리의 20~50배나 된다.
그래서 연구팀은 로봇 다리 부분 관절 내부에 연소실을 설치하고 거기서 소규모 폭발을 일으켜 로봇이 땅을 차는데 필요한 강력한 힘을 만들어 내기로 했다. 그리고 연소실에는 다리를 움직이기 위해 단순하면서도 작은 내연기관(엔진)을 내장했다.
작동원리는 다음과 같다.
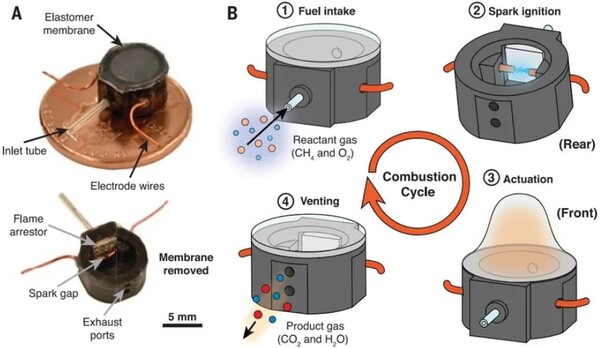
1)관절 연소실에서는 메탄과 산소가 주입되고 그 후 점화, 2)폭발이 일어나고 0.5초 이내에 부드러운 소재로 된 상부가 위쪽으로 부풀어 올라 9.5N의 힘이 생성, 3) 그 후에는 물과 이산화탄소 배출.
이 과정에서 가장 큰 과제는 연소 액추에이터(에너지를 기계적인 움직임으로 변환하는 장치)를 폭발에 견딜 수 있게 하는 것이다.
연구팀은 이 과제에 대해서 연소량을 억제하거나 난연성 소재(난연성 엘라스토머)를 이용하는 것으로 대처했다. 그 결과, 격렬하게 동작하는데도 75만 사이클(50Hz에서 8.5시간) 이상 연속 동작이 가능했다.
새로 개발된 로봇은 몸길이 29mm, 무게 1.6g로 작은 곤충 크기다. 그런데도 59cm 높이까지 점프하고 자기 무게의 22배나 되는 추를 메고 걸을 수 있다.
셰퍼드 박사는 “곤충 수준에 가까운 퍼포먼스로 매우 높고 빠르게 점프하고 큰 짐을 옮길 수 있다”고 말했다.
소형 로봇에게 높은 도약력을 갖게 하는 것은 쉽지 않지만 폭발이라는 간단한 방법이야말로 그 열쇠였던 것이다.
연구팀은 다음 연구 대상으로 액추에이터의 속도를 줄이는 방법을 염두에 두고 있으며, 이를 통해 동작 폭을 넓혀 나갈 예정이다.